
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Реферат: Работа комбинированной автоматической системы управления
Реферат: Работа комбинированной автоматической системы управления
Содержание
1.Задание
2.Проведение
эксперимента
3.Индентификация
каналов методом
Симою и проверка
аппроксимации
4.Расчет
оптимальных
настроек регулятора
одноконтурной
системы
5.Расчет
оптимальных
настроек регулятора
каскадной
системы
6.Расчет
компенсирующего
устройства
7.Расчет
оптимальных
настроек регулятора
одноконтурной
системы реального
объекта
8.Расчет
оптимальных
настроек регулятора
каскадной
системы реального
объекта
9.Расчет
компенсирующего
устройства
реального
объекта
10.Анализ
переходных
процессов
11.Перечень
файлов
12.Список
программного
обеспечения
1.Задание
Исследовать
работу комбинированной
автоматической
системы управления
в целом и её
отдельных
контуров. Провести
расчет оптимальных
настроечных
параметров
регуляторов
САР и провести
реализацию
полученных
результатов
на реальном
объекте –
Ремиконт-120.
Комбинированная
система управления
1
– основной
канал (Wоб(S));
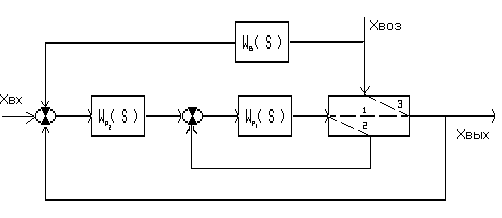
3 – канал по возмущению (Wов(S)).
2.Проведение
эксперимента
Для
проведения
эксперимента
на Р-120 собираем
3 модели: по
основному
каналу, по
внутреннему
каналу и по
каналу возмущения.
2.1 Проведение
эксперимента
по основному
каналу
Для снятия
кривой разгона
подаем на алгоблок
1.1 возмущающее
воздействие
амплитудой
10% и снимаем с
этого алгоблока
кривую разгона
.Заносим кривую
в файл VIT1.После
интерполяции
по 5 точкам и
нормирование
получаем кривую
разгона , представленную
в таблице /см.
табл. 2.1/

2.2 Проведение
эксперимента
по внутреннему
каналу

табл 2.2 Нормированная кривая разгона
2.3 Проведение
эксперимента
по каналу возмущения
Для снятия
кривой разгона
по каналу возмущения
проводим такие
же действия
,что и при снятии
первой кривой.
Полученную
кривую разгона
заносим в файл
VIT2.После
обработки
кривой результаты
заносим в таблицу
/см. табл. 2.3/
табл
2.3 Нормированная
кривая разгона

3.Идентификация каналов и методом Симою и проверка аппроксимацию
3.1 Основной
канал
В программе
ASR
по нормированной
кривой разгона
( исключая
запаздывание
) получим значения
площадей
:
F1=6.6627;
F2=14.5831;
F3=7.1130.
Т.о
передаточная
функция
объекта:W(s)об=1/14.583*s2+6.663*s+1
Проведем
проверку
аппроксимации
, т.е. найдем
статическую
ошибку нормированной
кривой разгона
от кривой разгона
, полученной
по переходному
процессу .
Воспользуемся
преобразованиями
по Карлону-Хевисайда
и теорему разложения
.
В результате
получим :
корни
характеристического
уравнения
:14.583*S2+6.663*S+1=0
S1=-0.228+j0.128
S2=-0.228-j0.128
Вещественная
часть корней
отрицательна
, следовательно
можно сделать
вывод об устойчивости
объекта.
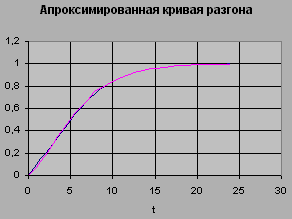
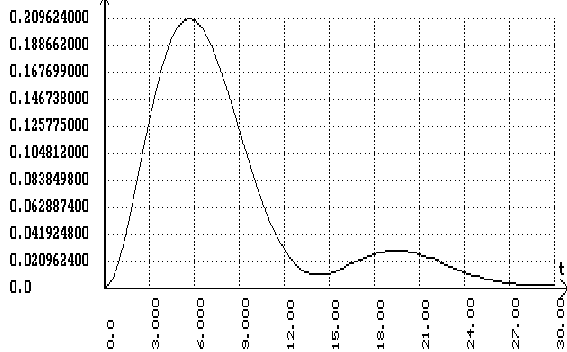
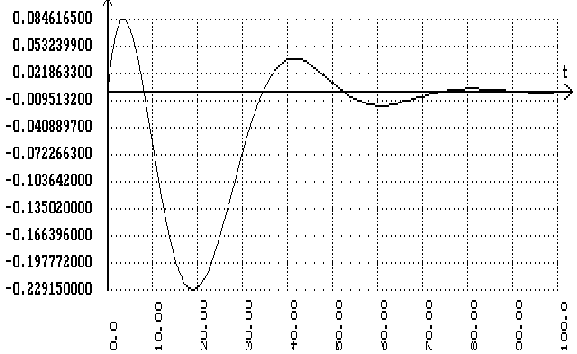
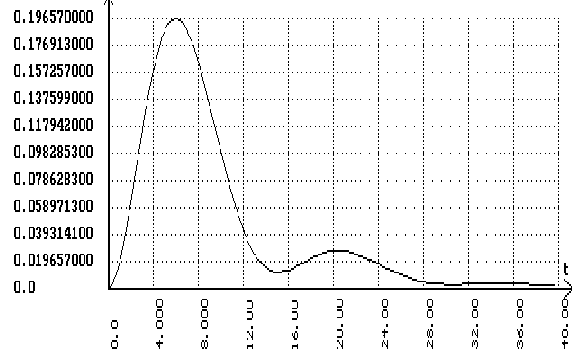
Переходной
процесс объекта
имеет вид
:
y(t)=1+2.046*cos(4.202-0.128*t)*e-0.228*t
В
это уравнение
подставляем
значение t
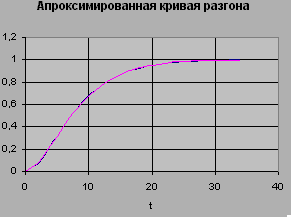
,получаем график
переходного
процесса по
основному
каналу (аппроксимированная
кривая разгона
)
табл. 3.1 Аппроксимированная
кривая разгона
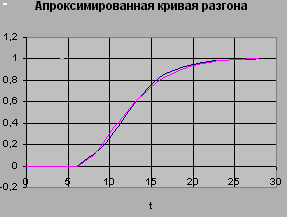
Сравнение
нормированной
кривой разгона
и полученного
переходного
процесса по
основному
каналу и будет
являться проверкой
аппроксимации
объекта
управления.
Расчетная
формула :
(h(t)-y(t))*100/h(y)
Максимальное
отклонение
составляет
(0.0533-0.0394)*100/0.0533=26%
Полная
передаточная
функция ( включая
звено чистого
запаздывания
) имеет вид:
W(s)об=1*e-6*s/14.583*s2+6.663*s+1
3.2 Внутренний
канал
В программе
ASR
по нормированной
кривой разгона
получим значения
площадей
F1=8.508;
F2=19.5765;
F3=0.4436.
Т.о
передаточная
функция объекта:
Проведем
проверку
аппроксимации
, т.е. найдем
статическую
ошибку нормированной
кривой разгона
от кривой разгона
, полученной
по переходному
процессу .
Воспользуемся
преобразованиями
по Карлону-Хевисайда
и теорему разложения
.
В результате
получим
:W(s)об1=1/19.576*s2+8.508*s+1
корни
характеристического
уравнения
:19.576*S2+8.508*S+1=0
S1=-0.21731+j0.06213
S2=-0.21731-j0.06213
Вещественная
часть корней
отрицательна
, следовательно
можно сделать
вывод об устойчивости
объекта.
Переходной
процесс объекта
имеет вид
:
y(t)=1+3.638*cos(4.434-0.062*t)*e-0.217*t
В
это уравнение
подставляем
значение t
,получаем график
переходного
процесса по
основному
каналу (аппроксимированная
кривая разгона
)
табл. 3.2 Аппроксимированная
кривая разгона
При сравнении
кривых разгона
получаем максимальное
отклонение
:
(0.0345-0.0321)*100/0.0345=7%
3.3 Канал
по возмущению
В программе
ASR
по нормированной
кривой разгона
получим значения
площадей
F1=5.8678;
F2=8.1402
F3=-4.8742.
Составляем
систему уравнений:
a1=5.868+b1
a2=8.14+b1*5.688
0=-4,874+b1*8.14
Откуда
b1=0.599
, a1=6.467
, a2=11.655
Т.о
передаточная
функция
объекта:W(s)ов=0.599*s/11.655*s2+6.467*s+1
Проведем
проверку
аппроксимации
, т.е. найдем
статическую
ошибку нормированной
кривой разгона
от кривой разгона
, полученной
по переходному
процессу .
Воспользуемся
преобразованиями
по Карлону-Хевисайда
и теорему разложения
.
В результате
получим :
корни
характеристического
уравнения
:11.655*S2+6.467*S+1=0
S1=-0.27743+j0.09397
S2=-0.27743-j0.09397
Вещественная
часть корней
отрицательна
, следовательно
можно сделать
вывод об устойчивости
объекта.
Переходной
процесс объекта
имеет вид
:
y(t)=1+2.605*cos(4.318-0.094*t)*e-0.277*t
В
это уравнение
подставляем
значение t
,получаем график
переходного
процесса по
основному
каналу (аппроксимированная
кривая разгона
)
табл. 3.2 Аппроксимированная
кривая разгона
При сравнении
кривых разгона
получаем максимальное
отклонение
:
(0.0966-0.0746)*100/0.0966=22.5%
4.Расчет
оптимальных
настроек регулятора
одноконтурной
системы
Важным
элементом
синтеза АСР
технологического
процесса является
расчет одноконтурной
системы регулирования
. При этом требуется
выбрать структуру
и найти числовые
значения параметров
регуляторов
. АСР образуется
при сочетании
объект регулирования
и регулятора
, и представляет
собой единую
динамическую
систему.
Расчет
настроек АСР
методом
Ротача.
Передаточная
функция объекта
по основному
каналу имеет
вид:
W(s)об=1*e-6*s/14.583*s2+6.663*s+1
В
программе
Linreg
производим
расчет оптимальных
настроечных
параметров
ПИ
регулятора:
Kп=0.51007;
Tи=5.32345;
wкр=0.14544.
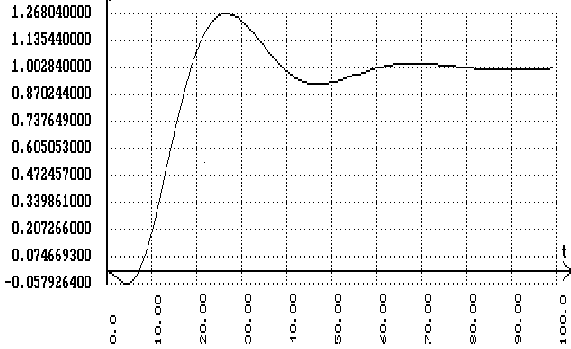
Cмоделируем
в пакете SIAM
переходные
процессы
одноконтурной
системы по
управляющему
и по возмущающему
воздействию.
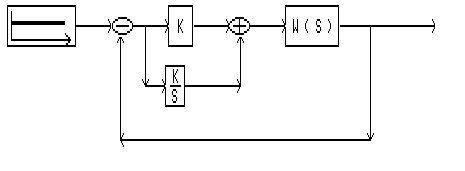
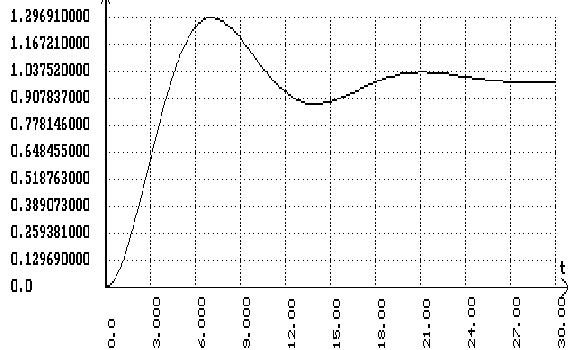
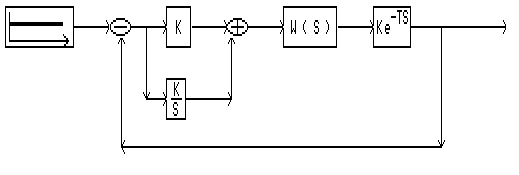
Структурная
схема одноконтурной
системы по
управляющему
воздействию
W(s)=1/(14.583*s2+6.663*s+1)
K=Kп=0.51007
K/S=Kп/Tи=0.0958
K=1,T=6
Переходной процесс
Перерегулирование – 26%
Время затухания – 65с
Степень затухания – 1
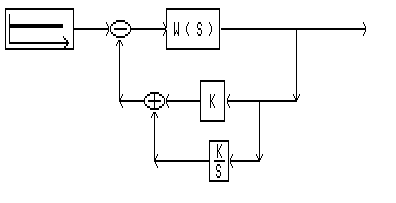
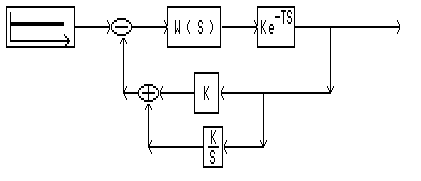
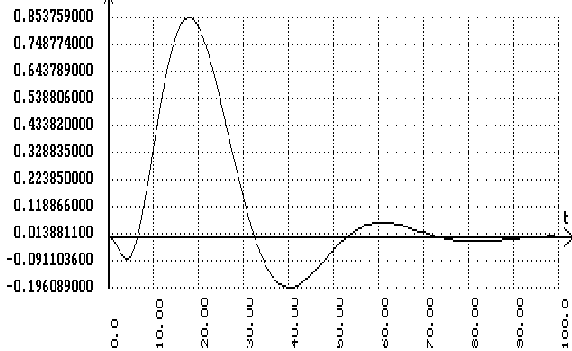
Структурная схема одноконтурной системы по возмущающему
воздействию
W(s)=1/(14.583*s2+6.663*s+1)
K=Kп=0.51007
K/S=Kп/Tи=0.0958
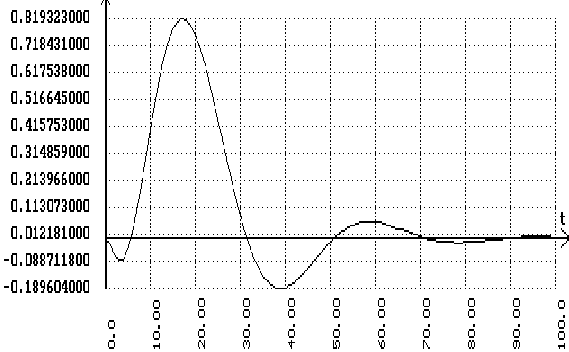
K=1,T=6
Перерегулирование – 82%
Время затухания – 65с
Степень затухания – 0.93
5. Расчет оптимальных настроек каскадной системы
5.1 Расчет
настроек по
внутреннему
каналу
Передаточная
функция объекта
по внутреннему
каналу имеет
вид:
W(s)об1=1/19.576*s2+8.508*s+1
Расчет
настроечных
параметров
регулятора
производим
методом Ротача
в программе
Linreg
. Результаты
:
Kп=4.06522
Ти=7.26837
wкр=0.4151
В
пакете Siam
смоделируем
переходные
процессы по
управляющему
и по возмущающему
воздействию
.
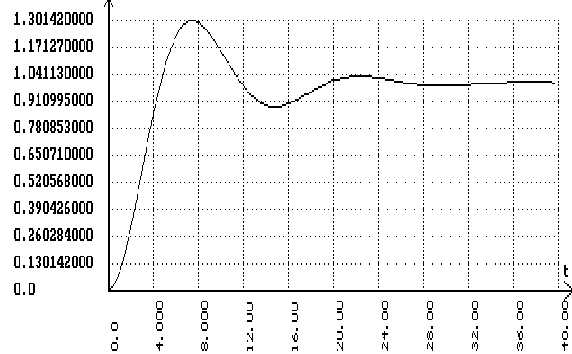
Структурная
схема внутреннего
канала по
управляющему
воздействию
W(s)=1/(19.576*s2+8.508*s+1)
K=Kп=4.06522
K/S=Kп/Tи=0.5593
Переходной процесс
Перерегулирование – 29%
Время затухания – 9с
Степень затухания – 0.86
Структурная схема внутреннего канала по возмущаеющему
воздействию
W(s)=1/(19.576*s2+8.508*s+1)
K=Kп=4.06522
K/S=Kп/Tи=0.5593
Переходной процесс
Перерегулирование – 21%
Время затухания – 13с
Степень затухания – 0.86
5.2 Выбор
и расчет передаточной
функции эквивалентного
объекта
Настроечные
коэффициенты
для регулятора
Р1 рассчитываются,
как настройки
для внутреннего
контура . Настроечные
коэффициенты
для регулятора
Р2 рассчитываются
по передаточной
функции эквивалентного
объекта .
Сравнивая
время затухания
переходных
процессов
внутреннего
и основного
контуров определяем
, что Wэкв
соответствует
виду : Wэкв(s)=Wоб(s)/Wоб1(s)
,
где Wоб(s)=1*e-6*s/(14.583*s2+6.663*s+1),
Wоб1(s)=1/(19.576*s2+8.508*s+1).
После
проведенных
расчетов получаем
:
Wэкв(s)=(19.576*s2+8.508*s+1)*e-6*s/(14.583*s2+6.663*s+1)
5.3 Расчет
оптимальных
настроек внешнего
регулятора
.
В программе
Linreg
вводим передаточную
функцию эквивалентного
объекта и получаем
значения оптимальных
настроек регулятора
Р2 .
Kп=0.19898
Ти=1.44671
Wкр=0.30928
В
пакете Siam
смоделируем
переходные
процессы по
управляющему
и по возмущающему
воздействию
.
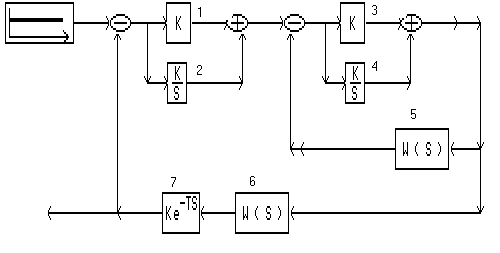
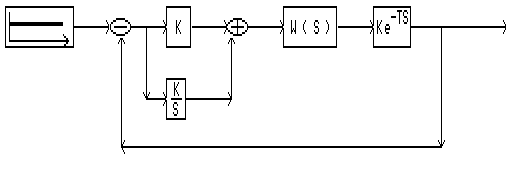
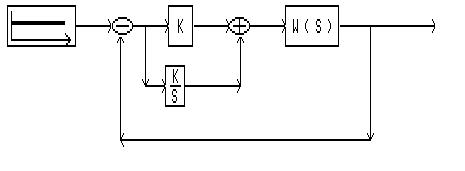
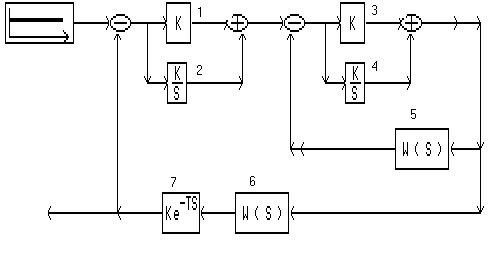
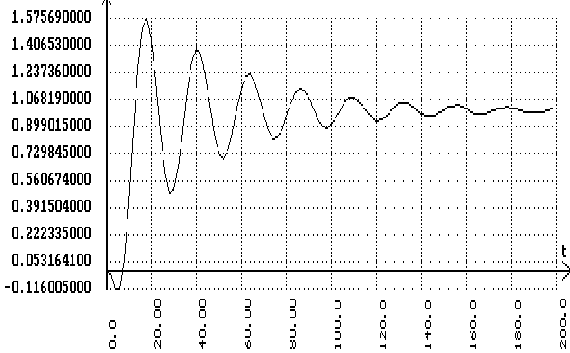
Структурная
схема каскадной
системы по
управляющему
воздействию
1.K=Kп=0.19898
2.K/S=Kп/Tи=0.13754
3.K=Kп=4.06522
4.K/S=Kп/Tи=0.5593
5.W(s)=1/(19.576*s2+8.508*s+1)
6.W(s)=1/(14.583*s2+6.663*s+1)
7.K=1,T=6
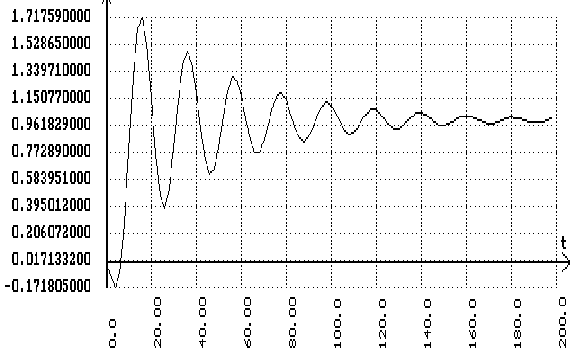
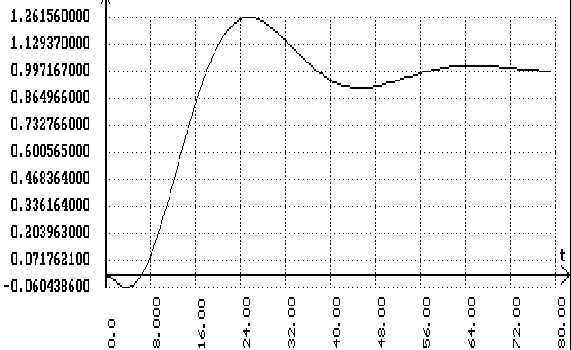
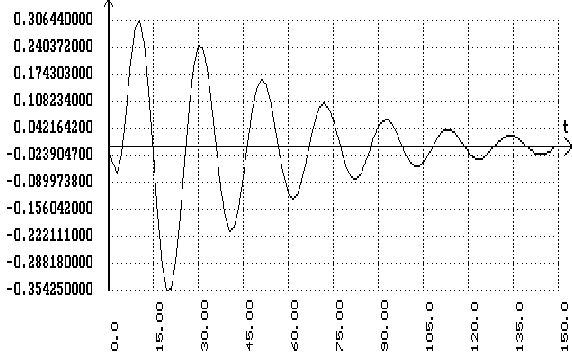
Переходной процесс
Перерегулирование – 72%
Время затухания – 150с
Степень затухания – 0.42
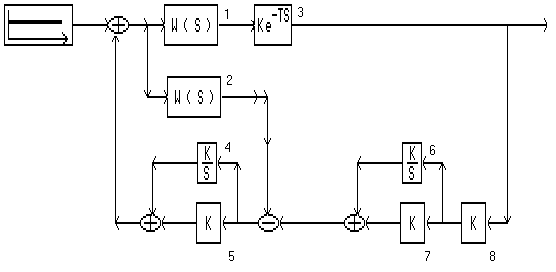
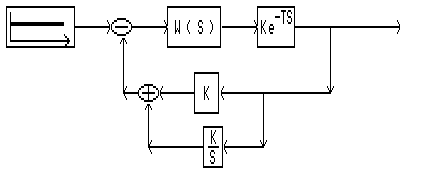
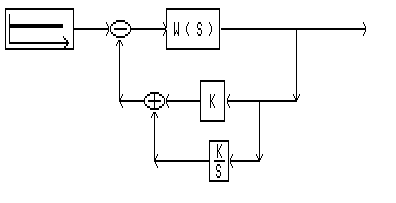
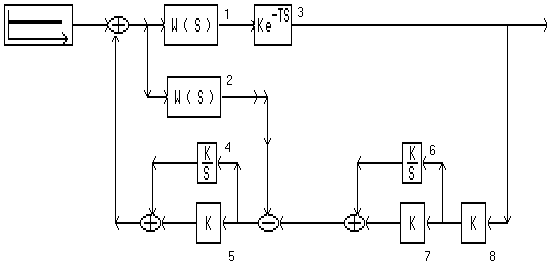
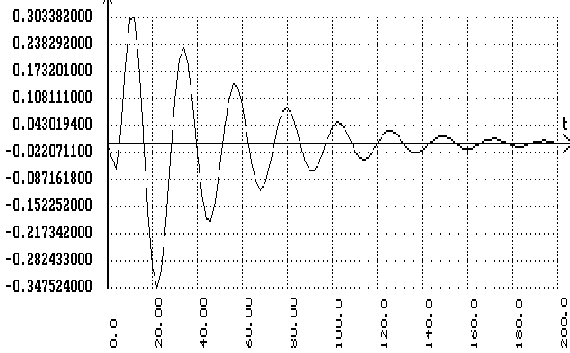
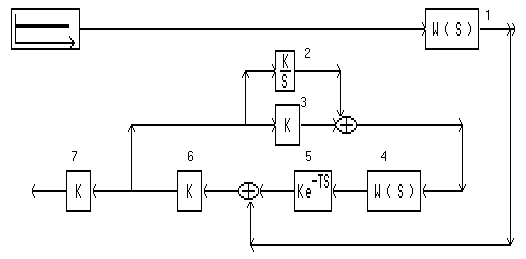
Структурная
схема каскадной
системы по
возмущающему
воздействию
1. W(s)=1/(14.583*s2+6.663*s+1)
2. W(s)=1/(19.576*s2+8.508*s+1)
3. K=1,T=6
4. K/S=Kп/Tи=0.5593
5. K=Kп=4.06522
6. K/S=Kп/Tи=0.13754
7. K=Kп=0.19898
8.K=-1
Переходной процесс
Перерегулирование – 31%
Время затухания – 110с
Степень затухания – 0.23
6. Расчет
компенсирующего
устройства
Для
этого смоделируем
в пакете SIAM
схему комбинированной
системы без
компенсатора
.
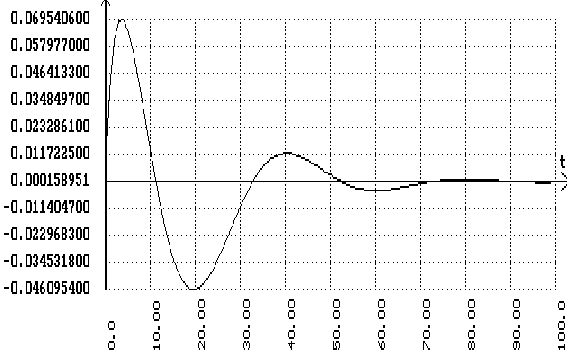
Структурная схема комбинированной системы без компенсатора
1.W(s)=0.599*s/(11.655*s2+6.467*s+1)
2.K=Kп=0.51007
3.K/S=Kп/Tи=0.0958
4.W(s)=1/(14.583*s2+6.663*s+1)
5.K=1,T=6
6.K=-1
7.K=-1
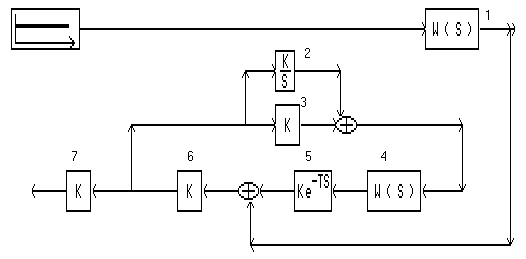
Переходной процесс
Перерегулирование – 7%
Время затухания – 35с
Степень затухания – 0.86
6.2 Комбинированная система управления с подачей дополнительного воздействия на вход регулятора
Определим
передаточную
функцию фильтра
согласно формуле
:
Wф(s)=Wов(s)/(Wоб(s)*Wр(s))
,
где Wов(s)
– передаточная
функция канала
по возмущению
,
Wоб(s)
- передаточная
функция объекта
,
Wр(s)
- передаточная
функция регулятора,
Находим
значения передаточной
функции фильтра
для нулевой
частоты
:
Aф(0)=Aов(0)/(Aоб(0)*Aр(0))=0
Fф(0)=Fов(0)-(Fоб(0)+Fр(0))=90
Находим
значения передаточной
функции фильтра
для резонансной
частоты
(w=0.14544):
Aф(w)=Aов(w)/(Aоб(w)*Aр(w))=0.072/(0.834*0.326)=0.265
Fф(w)=Fов(w)-(Fоб(w)+Fр(w))=141-(-130+(-52))=323=-37
В качестве компенсатора возмущения используем реальное дифференциальное звено : Wk(s)=Kв*Тв(s)/(Tв(s)+1)
Координаты
компенсатора
определяем
геометрически
.
Kв=ОД=0.32
Тв=(1/w)*sqrt(ОС/ДС)=8.876
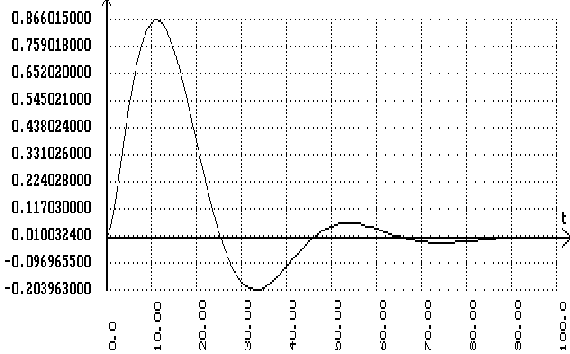
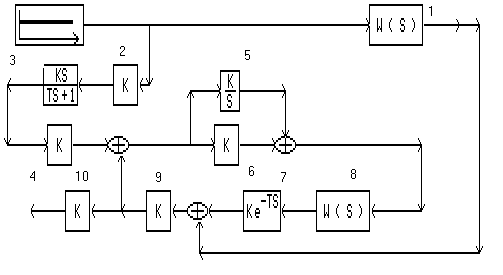
Cмоделируем в пакете SIAM схему комбинированной системы c компенсатором .
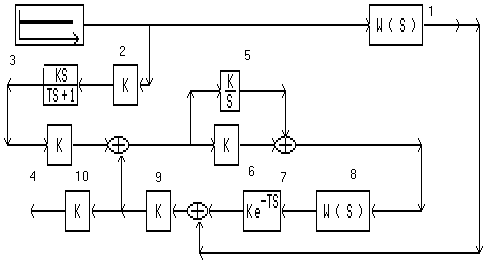
Структурная
схема комбинированной
системы с
компенсатором
1.W(s)=0.599*s/(11.655*s2+6.467*s+1)
2.К=0.32
3.К=8.786,Т=8.786
4.К=-1
5.K/S=Kп/Tи=0.0958
6.K=Kп=0.51007
7.K=1,T=6
8.W(s)=1/(14.583*s2+6.663*s+1)
9.К=-1
10.К=-1
Переходной процесс
Перерегулирование – 8%
Время затухания – 60с
Степень затухания –0.56
7.Расчет
оптимальных
настроек регулятора
одноконтурной
системы реального
объекта
Расчет
настроек АСР
методом
Ротача.
Передаточная
функция объекта
по основному
каналу имеет
вид:
W(s)об=1*e-6*s/13.824*s3+17.28*s2+7.2*s+1
В
программе
Linreg
производим
расчет оптимальных
настроечных
параметров
ПИ регулятора:
Kп=0.49;
Tи=5.346;
wкр=0.1403.
Cмоделируем
в пакете SIAM
переходные
процессы
одноконтурной
системы по
управляющему
и по возмущающему
воздействию.
Структурная
схема одноконтурной
системы по
управляющему
воздействию
W(s)=1/( W(s)об1=1/13.824*s3+17.28*s2+7.2*s+1
K=Kп=0.49
K/S=Kп/Tи=0.0916
K=1,T=6
Переходной процесс
Перерегулирование – 27%
Время затухания – 70с
Степень затухания – 1
Структурная схема одноконтурной системы по возмущающему
воздействию
W(s)=1/( W(s)об1=1/13.824*s3+17.28*s2+7.2*s+1
K=Kп=0.49
K/S=Kп/Tи=0.0916
K=1,T=6
Перерегулирование – 85%
Время затухания – 70с
Степень затухания – 0.94
8. Расчет оптимальных настроек каскадной системы
8.1 Расчет
настроек по
внутреннему
каналу
Передаточная
функция объекта
по внутреннему
каналу имеет
вид:
W(s)об1=1/23.04*s2+9.6*s+1
Расчет
настроечных
параметров
регулятора
производим
методом Ротача
в программе
Linreg
. Результаты
:
Kп=4.396
Ти=7.875
wкр=0.3931
В
пакете Siam
смоделируем
переходные
процессы по
управляющему
и по возмущающему
воздействию
.
Структурная
схема внутреннего
канала по
управляющему
воздействию
W(s)=1/(23.04*s2+9.6*s+1)
K=Kп=4.396
K/S=Kп/Tи=0.5582
Переходной процесс
Перерегулирование – 30%
Время затухания – 20с
Степень затухания – 0.9
Структурная схема внутреннего канала по возмущаеющему
воздействию
W(s)=1/(23.04*s2+9.6*s+1)
K=Kп=4.396
K/S=Kп/Tи=0.5582
Переходной процесс
Перерегулирование – 20%
Время затухания – 20с
Степень затухания – 0.85
8.2 Выбор
и расчет передаточной
функции эквивалентного
объекта
Настроечные
коэффициенты
для регулятора
Р1 рассчитываются
, как настройки
для внутреннего
контура . Настроечные
коэффициенты
для регулятора
Р2 рассчитываются
по передаточной
функции эквивалентного
объекта .
Сравнивая
время затухания
переходных
процессов
внутреннего
и основного
контуров определяем
, что Wэкв
соответствует
виду : Wэкв(s)=Wоб(s)/Wоб1(s)
,
где
Wоб(s)=1*e-6*s/(13.824*s3*17.28*s2+7.2*s+1),
Wоб1(s)=1/(23.04*s2+9.6*s+1).
После
проведенных
расчетов получаем
:
Wэкв(s)=(23.04*s2+9.6*s+1)*e-6*s/(13.824*s3*17.28*s2+7.2*s+1)
8.3 Расчет
оптимальных
настроек внешнего
регулятора
.
В программе
Linreg
вводим передаточную
функцию эквивалентного
объекта и получаем
значения оптимальных
настроек регулятора
Р2 .
Kп=0.111
Ти=1.037
Wкр=0.29101
В
пакете Siam
смоделируем
переходные
процессы по
управляющему
и по возмущающему
воздействию
.
Структурная
схема каскадной
системы по
управляющему
воздействию
1.K=Kп=0.111
2.K/S=Kп/Tи=0.107
3.K=Kп=4.396
4.K/S=Kп/Tи=0.5582
5.W(s)=1/(23.04*s2+9.6*s+1)
6.W(s)=1/(13.824*s3*17.28*s2+7.2*s+1)
7.K=1,T=6
Переходной процесс
Перерегулирование – 57%
Время затухания – 150с
Степень затухания – 0.91
Структурная
схема каскадной
системы по
возмущаещему
воздействию
1. W(s)=1/(13.824*s3*17.28*s2+7.2*s+1)
2. W(s)=1/(23.04*s2+9.6*s+1)
3. K=1,T=6
4. K/S=Kп/Tи=0.5582
5. K=Kп=4.396
6. K/S=Kп/Tи=0.107
7. K=Kп=0.111
8.K=-1
Переходной процесс
Перерегулирование – 30%
Время затухания – 120с
Степень затухания – 0.23
9. Расчет
компенсирующего
устройства
Для
этого смоделируем
в пакете SIAM
схему комбинированной
системы без
компенсатора
.
Структурная схема комбинированной системы без компенсатора
1.W(s)=1/(9*s2+6*s+1)
2.K=Kп=0.49
3.K/S=Kп/Tи=0.0916
4.W(s)=1/(13.824*s3*17.28*s2+7.2*s+1)
5.K=1,T=6
6.K=-1
7.K=-1
Переходной процесс
Перерегулирование – 87%
Время затухания – 65с
Степень затухания –0.95
9.2 Комбинированная система управления с подачей дополнительного воздействия на вход регулятора
Определим
передаточную
функцию фильтра
согласно формуле
:
Wф(s)=Wов(s)/(Wоб(s)*Wр(s))
,
где Wов(s)
– передаточная
функция канала
по возмущению
,
Wоб(s)
- передаточная
функция объекта
,
Wр(s)
- передаточная
функция регулятора,
Находим
значения передаточной
функции фильтра
для нулевой
частоты
:
Aф(0)=Aов(0)/(Aоб(0)*Aр(0))=0
Fф(0)=Fов(0)-(Fоб(0)+Fр(0))=90
Находим
значения передаточной
функции фильтра
для резонансной
частоты
(w=0.14544):
Aф(w)=Aов(w)/(Aоб(w)*Aр(w))=0.769/(0.816*0.851)=1.13
Fф(w)=Fов(w)-(Fоб(w)+Fр(w))=-46-(-53+(-76))=83
В качестве компенсатора возмущения используем реальное дифференциальное звено : Wk(s)=Kв*Тв(s)/(Tв(s)+1)
Координаты
компенсатора
определяем
геометрически
.
Kв=ОД=7
Тв=(1/w)*sqrt(ОС/ДС)=1.018
Cмоделируем в пакете SIAM схему комбинированной системы c компенсатором .
Структурная
схема комбинированной
системы с
компенсатором
1.W(s)=1/(9*s2+6*s+1)
2.К=7
3.К=1.018,Т=1.018
4.К=-1
5.K/S=Kп/Tи=0.0916
6.K=Kп=0.49
7.K=1,T=6
8.W(s)=1/(13.824*s3*17.28*s2+7.2*s+1)
9.К=-1
10.К=-1
Переходной процесс
Перерегулирование – 56%
Время затухания – 70с
Степень затухания –0.93
10. Анализ переходных процессов
10.1 Анализ
переходных
процессов
модели
Для
того чтобы
сделать анализ
составляется
сводная таблица
переходных
процессов
|
Cхема регулирования |
по управлению |
по возмущению |
||||
|
перере- |
время |
степень |
перере- |
время |
степень |
|
|
гулиров |
регулир |
регулир |
гулиров |
регулир |
регулир |
|
|
одноконтурная |
26 |
65 |
1 |
82 |
65 |
0.93 |
|
каскадная |
72 |
150 |
0.42 |
31 |
110 |
0.23 |
|
комбинированная без компенсатора |
7 |
35 |
0.86 |
|||
|
комбинированная с компенсатором |
8 |
60 |
0.56 |
По данным полученным в результате расчетов можно сделать вывод , что лучше справляется с регулированием каскадная АСР без компенсатора возмущения .
10.2 Анализ переходных процессов реального обьекта
|
Cхема регулирования |
по управлению |
по возмущению |
||||
|
перере- |
время |
степень |
перере- |
время |
степень |
|
|
гулиров |
регулир |
регулир |
гулиров |
регулир |
регулир |
|
|
одноконтурная |
27 |
70 |
1 |
85 |
70 |
0.94 |
|
каскадная |
57 |
150 |
0.9 |
30 |
120 |
0.23 |
|
комбинированная без компенсатора |
87 |
65 |
0.95 |
|||
|
комбинированная с компенсатором |
56 |
70 |
0.93 |
По данным полученным в результате расчетов можно сделать вывод , что лучше справляется с регулированием каскадная АСР c компенсатором возмущения .
11. Перечень
файлов
VIT1
– кривая разгона
по основному
каналу
VIT2
- кривая разгона
по внутреннему
каналу
VIT3
- кривая разгона
по каналу
возмущения
VIT_1
- аппроксимированная
кривая разгона
по основному
каналу
VIT_2
- аппроксимированная
кривая разгона
по внутреннему
каналу
VIT_3
- аппроксимированная
кривая разгона
по каналу
возмущения
S_ODN_U
– структурная
схема одноконтурной
системы по
управлению
S_ODN_V
- структурная
схема одноконтурной
системы по
возмущению
S_VN_U
- структурная
схема внутреннего
канала по
управлению
S_VN_V
- структурная
схема внутреннего
канала по
возмущению
S_KAS_U
- структурная
схема каскадной
системы по
управлению
S_KAS_V
- структурная
схема каскадной
системы по
возмущению
S_KOM_NO
- структурная
схема комбинированной
системы по
управлению
S_KOM_R
- структурная
схема комбинированной
системы по
возмущению
12. Список
программного
обеспечения
1.ASR
2.LINREG
3.SIAM
