
Рефераты по биологии
Рефераты по экономике
Рефераты по москвоведению
Рефераты по экологии
Краткое содержание произведений
Рефераты по физкультуре и спорту
Топики по английскому языку
Рефераты по математике
Рефераты по музыке
Остальные рефераты
Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Реферат: Изучение механизмов металлорежущих станков
Реферат: Изучение механизмов металлорежущих станков
Министерство образования РФ
Тверской Государственный Технический Университет
Кафедра "Металлорежущие станки и инструменты"
Изучение механизмов металорежущих станков
Методические указания
к лабораторной работе по курсу "Металорежущие станки"
для студентов специальности 1201- "Технология машиностроения"
Тверь 2001
В методических указаниях к лабораторной работе "Изучение механизмов металлорежущих станков" изложены основные понятия и положения по систематике и функциональному назначению механизмов, входящих в кинематические цепи станков.
Лабораторная работа предназначена для изучения курса "Металлорежущие станки". Методические указания (второе издание) рекомендованы к применению на заседании кафедры "Металлорежущие станки и инструменты" (протокол №2 от 02.11.2000)
Автор: Клюйко Э.В.
СОДЕРЖАНИЕ
| 1. | Стр. |
| 2. 1. Цель работы............................................................................................ | 3 |
| 3. 2. Порядок проведения работы................................................................. | 3 |
| 4. 3. Назначение и состав механизмов......................................................... | 3 |
| 5. 4. Структурные свойства механизмов.................................................... | 8 |
| 6. 5. Функциональные свойства механизмов ............................................. | 11 |
| 7. 6. Примеры анализа механизмов.............................................................. | 13 |
| 8. 7. Индивидуальные задания по анализу механизмов............................. | 17 |
| 9. 8. Контрольные вопросы........................................................................... | 18 |
| 9. Библиографический список ................................................................. | 18 |
| 10. Приложение ............................................... ......................................... | 19 |
1. ЦЕЛЬ РАБОТЫ
1. Изучить основные свойства передаточных механизмов станков.
2. Приобрести определенные навыки в анализе структурных и функциональных свойств механизмов станков.
2. ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ
1. Ознакомиться с основными свойствими передаточные механизмов станков,
2. Изучить методику анализа структурных и функциональных свойств механизмов станков.
3. По индивидуальному заданию (альбом, макеты механизмов и Приложение на стр 20…22) проанализировать основные свойства и характеристики станочных механизмов.
3. НАЗНАЧЕНИЕ И СОСТАВ МЕХАНИЗМОВ
В металлорежущих станках все многообразие механизмов, предназначенных для создания определенных движений, подразделяют на двигательные (приводные), передаточные и исполнительные (формообразующие). Наиболее многочисленные из них передаточные [1,4]. Отличаются они друг от друга по назначению (реверсирующие, суммирующие, корректирующие и др.), по конструкции (шарнирно-рычажные, кулачковые, зубчатые, винтовые и др.) по исполнению опор и зацеплении (передачи скольжения, передачи качения и т.д.).
Механизмы представляют собой (рис. 1) подвижные соединения нескольких тел, предназначенных для преобразования движений. Имеется в виду как замена одного вида движения на другое (рис. 1а, 1в), так и передача движения с количественным изменением его параметров (рис. 1г). В качестве основных характеристик движения при настройке механизмов станков, используют пять параметров: траекторию, путь (угловой или линейный), скорость, направление и положение входного или выходного звеньев [2,4].
Передаточные механизмы состоят из звеньев, образующих на стыках между собой кинематические пары (j;k). Звено j или k - это одно ли несколько деталей, жестко (без относительных смещений) связанных между собой. Например, на рис. 1г звено 3 образуют вал и закрепленные на нем шестерни z4 и z5. Звенья могут быть твердыми и деформируемыми, подвижными и неподвижными, ведущими и ведомыми. Основные типы подвижных звеньев, применяемые в станках приведены в таблице 1 и в альбоме ([3], стр.63). Кроме концевых подвижных звеньев в механизмах могут быть промежуточные подвижные звенья и всегда есть одно неподвижное звено, называемое основанием или стойкой. Поэтому можно сказать, что механизм - это многозвенная подвижная передаточная система с одним неподвижным звеном. На рис. 1а показан четырехзвенный (с учетом стойки) механизм привода ползуна 3 долбежного станка. Для компенсации перекосов в шарнирах и смягчения ударной нагрузки в паре (1;2) введена избыточная подвижность (v12=2 вместо v12=1). Для придания повышенной жесткости одинаковым рычагам 1 и 3 (рис 1б) к ним в пятизвенном механизме зажимного приспособления присоединен дополнительный шатун 4. На рис 1б показан простейший трехзвенный пространственный механизм с дисковым кулачком 1 и качающимся толкателем 2, применяемый в приводе подачи шпиндельной бабки токарного автомата (кулачок вращается параллельно плоскости yz, а толкатель качается в плоскости ху). Сложный восьмизвенный двухпоточный механизм привода стола продольно-фрезерного станка (рис. 1г) позволяет уменьшить зазоры в косозубых зубчатых передачах и распределить силовую нагрузку между приводными валами 4 и 6 в соответствии с их жесткостью.
Рис.1. Примеры передаточных механизмов:
а) – кривошипно-ползунный механизм с избыточной подвижностью в паре (1;2);
б) – шарнирно рычажный механизм с избыточным звеном 4;
в) – кулачково-рычажный пространственный механизм;
г) – зубчатый замкнутый механизм привода стола
Таблица 1
Основные типы звеньев в механизмах |
|||
|
№ |
Тип звена | Назначение | Условное обозначение |
|
1 |
Стойка (основание) |
неподвижное звено | |
|
2 |
Кривошип | вращательное звено | |
|
3 |
Коромысло (рычаг) | качательное звено | |
| 4 | Кулачок | вращательное или поступательное звено с плоским или пространственным криволинейным профилем | |
| 5 | Шестерня | вращательное звено в виде колеса с зубчатым венцом | |
| 6 | Рейка | поступательное звено в виде стержня с зубчатой нарезкой | |
| 7 | Шатун |
Звено, совершающее плоское или пространственное движение |
|
| 8 | Ползун (толкатель) | Звено, совершающее поступательное движение | |
| 9 | Кулиса | Звено, совершающее любое движение и несущее направляющие плоскости для другого звена | |
| 10 |
Винт (ходовой винт) |
Звено в виде вала с винтовой нарезкой для создания вращательного поступательного или винтового движения | |
| 11 |
Гайка а– простая б– маточная в– шариковая |
звено, охватывающее в зацеплении ходовой винт для передачи движения |
а б в |
Кинематическая пара (j;k) представляет собой подвижное соединение двух звеньев j и k. Подвижное соединение может быть выполнено по поверхностям (в низших парах) и по линиям или точкам (в высших парах). Подвижный контакт в парах может поддерживаться геометрическим, силовым или кинематическим замыканием. В первом случае используют ограничение (охват) одних поверхностей другими (рис. 1а, направляющая О для ползуна 3), во втором – применяют пружины (рис 1в), груз или гидроприжим, в третьем – используют дополнительную кинематическую цепь механизмов (рис. 1г). Конструктивно кинематическая пара обычно представляет собой подвижный контакт звеньев в подшипниковых опорах или зацепление этих звеьев. Основные типы пар приведены в таблице 2 (арабскими цифрами в таблице обозначены звенья.)
Основной характеристикой кинематической пары является ее подвижность vjk, т.е число относительных смещений (линейных или угловых) между звеньями j и k.
Таким образом, передаточный механизм - это совокупность нескольких звеньев, связанных в кинематические пары и предназначенных для преобразования движений одних звеньев (входных) в движения других звеньев (выходных). В таблице 3 приведены основные типы передаточных механизмов общего назначения, применяемые в станках.
Наряду с обычными механическими передачами в металлорежущих станках применяют технологические механизмы, которые являются основными исполнительными механизмами станков и отличаются от передаточных механизмов наличием технологической пары, представляющей собой подвижный контакт инструмента относительно обрабатываемого изделия (табл.2). В технологической паре вместо скольжения или качения создается срезание материала и формообразование изделия. В соответствии с способом обработки технологические пары называют токарными, фрезерными, шлифовальными парами и т.д. На рис.2. приведен пример механизма шлифования с одной шлифовальной парой (2;5)
Рис.2. Механизм врезного шлифования кулачков распредвалов: 1-качающаяся люлька, несущая на себе шпиндель 2 с изделием Д и копиром К;
3-копировальный ролик, установленный на
подшипниках О1 и контактирующий с копиром;
4-шлифкруг на шпиндельных опорах О2 .
Пружина П создает силовой контакт между
копиром и роликом. Ведущим является вращение
шпинделя 2 с изделием и копиром.
Таблица 2
| Типы кинематических пар в передаточных механизмах (по ГОСТ 2.770-68 и по рекомендациям ICO ТК/10 ПК4 | ||||||||||
| № | Наименование | Условное изображение |
Подвижность, vjk, |
Замыкание | № | Наименование | Условное изображение |
Подвижность, vjk, |
Замыкание | |
| 1 | Ползунная | 1 | Геометрическое | 6 |
Сферическая
|
3 2 |
геометри-ческое | |||
| 2 | Вращательная | 1 | -“- | 7 |
Зубчатая
|
2 4 или 5 |
силовое и геометрическое | |||
| 3 |
Винтовая б) качения |
1 | -“- | 8 |
Кулачковая
б) пространственная |
2 4 или 5 |
силовое и геометрическое | |||
| 4 | Цилиндри-ческая | 2 | -“- | |||||||
| 9 |
Технологическая
(токарная, фрезерная, шлифовальная и т.д.) б) с точечным формообразующим контактом |
1 2 |
силовое | |||||||
| 5 |
Плоская б) с пальцем |
3 2 |
Силовое Силовое и геометрическое |
|||||||
4. СТРУКТУРНЫЕ СВОЙСТВА МЕХАНИЗМОВ
4.1. Сложность N механизма. В металлорежущих станках сложные подвижные механические системы, передающие движения от входного звена к выходному (шпиндель, суппорт и т.д.) и образующие последовательные связи между этими звеньями, называют кинематической цепью механизмов Еще более сложными являются так называемые кинематические группы [2], которые предназначены для создания сложных исполнительных движений и состоящие из нескольких кинематических цепей. Любые кинематические цепи механизмов или их участки, образующие сложные механизмы, могут быть расчленены на простые.
Простой механизм (или передача)- это такой, в котором число звеньев (с учетом неподвижного) равно числу кинематические пар, то есть p = n + 1, где р – число кинематических пар, n – число подвижных звеньев. Графическое изображение основных типов простых механизмов стандартизовано, (см. [3], стр. 65). Каждое звено в простом механизме образует подвижное соединение с двумя другими звеньями. Сложные механизмы содержат несколько простых; в них есть звенья, подвижно связанные более чем с двумя другими звеньями (рис. 3 и 4).
Число N простых механизмов в сложном равно
N = p – n (1)
Если вычисление по формуле (1) дает N = 1, то механизм простой; если N > 1, то механизм сложный; при N < 1 механизм вырождается в жесткую ферму. В числе р кинематических пар в формуле (1) не учитывают избыточные (пассивные) пары, вводимые в механизмы в виде дополнительных опор и зацеплений. Например, в дифференциале(рис.5), такой опорой является пара (2;4) между водилом 2 и ступицей 4 шестерен z4 и z8.
Таким образом, степень сложности механизма определяется в нем числом простых передач.
4.2. Размерность R механизма. Она определяется числом измерений движения звеньев механизма и равна числу независимых уравнений, связывающих параметры движения (положения или скорости или ускорения) всех звеньев механизма. Например, в шарнирном четырехзвеннике А (рис.3) для четырех переменных параметров положения (углы поворота j4, j5, j6, j7) имеем три независимых уравнения связи, то есть R=3:
![]()
|
2) ![]() -проекция
на ось у
-проекция
на ось у
3) ![]() - сумма внутренних углов
4-звенника
- сумма внутренних углов
4-звенника
Из примера следует, что размерность простого механизма на единицу меньше числа vå параметров его положения, то есть в большинстве механизмов R = (vå – 1). Это обстоятельство позволяет определить R для существующего (известного) механизма без составления вышеуказанных уравнений. Например, для передачи «винт-гайка», R=2, так как параметров положения три: угловое положение винта, линейное положение гайки, а также относительное смещение в зацеплении витков винта и гайки. Для неизвестного (нового) механизма система R вышеуказанных уравнений (2) определяет условия существования механизма и ограничивает число измерений пространства, в котором происходит движение. В общем случае пространство движений – шестимерно. Поэтому размерность R простого механизма определяется зависимостью
R=6 – cг (3)
где cг – число общих геометрических связей, ограничивающих пространство движений звеньев механизма. Например, для передачи «винт-гайка» cг=4 (допускается только две подвижности в механизме: вращение вокруг оси винта и перемещение вдоль этой оси), а для кулачкового механизма (рис. 2 в) величина cг=2 (невозможно вращение одного из звеньев вокруг оси y и перемещение перпендикулярно плоскости xy). Так как движения звеньев механизмов не могут иметь более 6-и измерений, то все простые механизмы делят на:
1) одномерные, R=1 (приводные электро-, гидро- и пневмодвигатели);
2) двухмерные, R=2 (например, трехзвенные клиновые, винтовые и фрикционные механизмы);
3) трехмерные, R=3 (все плоские шарнирно-рычажные, кулачковые, зубчатые и поводковые механизмы, а также сферические и зубчато-рычажные механизмы);
4) четырехмерные, R=4 (например пространственные рычажно-винтовые и кулачковые механизмы;
5) пятимерные, R=5 (например пространственные шарнирно-рычажные, кулачковые и зубчато-рычажные механизмы);
6) шестимерные, R=6 (например пространственные шарнирно-рычажные, кулачковые и зубчато-рычажные механизмы)
4.3. Подвижность W
механизма. Она определяется числом
степеней свободы движений в механизме, т.е. числом независимых движений на
разных входных звеньях, передающих их на одно выходное звено механизма. В
соответствии с этим механизмы могут быть одноподвижными (подавляющее
большинство) и многоподвижными. Примерами последних являются
разнообразные суммирующие механизмы станков ([3], стр.79) и промышленные
роботы. Подвижность всего механизма зависит от подвижностей ![]() отдельных кинематических
пар (j;k), определяемых числом возможных перемещений одного
звена пары относительно другого. Могут быть одно-, двух-,…, пятиподвижные
кинематические пары (табл.2).
отдельных кинематических
пар (j;k), определяемых числом возможных перемещений одного
звена пары относительно другого. Могут быть одно-, двух-,…, пятиподвижные
кинематические пары (табл.2).
В сложном передаточном механизме общая подвижность определяется следующим выражением:
![]() (4)
(4)
где ![]() -
суммарная подвижность всех р кинематических пар механизма,
-
суммарная подвижность всех р кинематических пар механизма, ![]() ;
;
Rå - сумма размерностей N простых механизмов, входящих в состав сложного, Rå= R1+ R2+…+ RN;
vп – число местных избыточных (пассивных) подвижностей в кинематических парах. Например, лишняя подвижность в паре Р12 (рис.1а) или «лишнее» вращение ролика 2 (рис.3) на рычажном толкателе 3, не влияют на положение и движение других звеньев механизма. Избыточные подвижности применяют для уменьшения трения, для компенсации перекосов и других погрешностей с целью повышения работоспособности механизмов.
ск- число жестких кинематических связей в сложном механизме. К числу кинематических связей относятся как отдельные дополнительные звенья (рычаги, кулачки, шестерни и т.п.), так и цепи дополнительных механизмов, дублирующих или дополняющих работу основных передач. Указанные кинематические связи образуют замкнутые механические контуры (замкнутые механизмы) и способствуют повышению точности, жесткости и других свойств механизмов. Примерами простейших кинематических связей являются дополнительные шатун 4 (рис.1б) и сателлит 7 (рис.5). Пример более сложной кинематической связи показан на рис.1г. Здесь от двигателя М с помощью зубчатой пары z1/z2 на вал 2 передается вращение, которое затем разделяется на два потока передачами z3/z4 , z5/z6 и z7/z8 , z9/z10, замыкаясь с помощью шестерен z11 и z12 на зубчатой рейке, закрепленной на столе станка. Усилие Q гидроцилиндра или мощной пружины 3 на вал2, благодаря косозубым зацеплениям шестерен, создает дополнительный натяг между боковыми поверхностями зубьев колес z11, z12 с рейкой. В этом механизме n=7, p=14, N=7, ск=1 (один замкнутый контур), vп=0 и W = ( 14 + 7 ) + 1 – 7 × 3 = 1 (все простые механизмы – трехмерные, Rj=3).
Подвижность простого механизма в соответствии с (4) равна:
W = vS - Rj - vп (5)
Здесь ск=0, т.к. введение кинематических связей в простой механизм делает его сложным. Например, присоединение дополнительного шатуна 4 (рис. 1б) в шарнирный четырехзвенник добавляет в него две кинематические пары, поэтому N = 6 – 4 = 2 (два подобных четырехзвенника).
5. ФУНКЦИОНАЛЬНЫЕ СВОЙСТВА МЕХАНИЗМОВ.
5.1. Трансформизм. Он характеризуется передаточным отношением i12, равным производной от параметра положения (j2, S2) выходного звена 2 по параметру положения (j1, S1) входного звена 1 (jj – угол поворота, Sj – линейное смещение звена j). Величина i12 определяется по формулам:
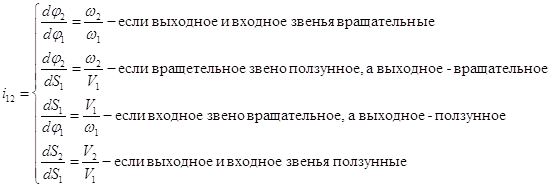
здесь w1, w2, V1, V2 – угловая и линейная скорость звеньев 1 и 2.
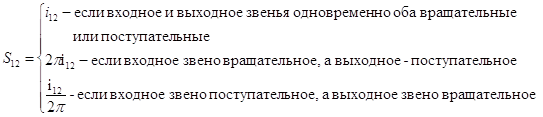
Для механизмов, в которых входные и выходные звенья имеют равномерные движения вместо понятия передаточное отношение i12 удобнее пользоваться понятием ход Sjk механизма, под которым понимают угловое (или прямолинейное) перемещение ведомого звена 2 за один оборот (или один мм) перемещения ведущего звена 1. В зависимости от типа передач ход S12 равен:
Если механизм сложный (кинематическая цепь механизмов с n подвижными звеньями), то передаточное отношение i1n от звена 1 к звену n равно:
![]() ,
(6)
,
(6)
то есть передаточное отношение сложного механизма равно произведению передаточных отношений простых механизмов. Соответственно, если перемещения звеньев в механизме определяется с помощью ходов Sjk простых механизмов, то xод S1n сложного механизма:
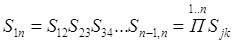 (7)
(7)
5.2. Равномерность (линейность) механизма. Это свойство определяется постоянством хода или передаточного отношения в механизме. Если, например, j1 – угол поворота входного звена, j2 – угол поворота выходного звена и j2=i12j1, где i12=const, то механизм линейный; если i12¹const, то механизм неравномерный. Наличие в сложном механизме хотя бы одного простого неравномерного механизма делает весь сложный механизм тоже неравномерным.
В таблице 3 приведены основные типы станочных равномерных механизмов, их ходы S12 и передаточные отношения i12. В примечании к табл.3 указаны расчетные параметры этих механизмов.
Нелинейность движения механизма оценивают
коэффициентом неравномерности ![]() равным:
равным:
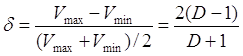 ,
(7)
,
(7)
где D -
диапазон скоростей, D = Vmax/Vmin ; Vmax, Vmin –
скорость (наибольшая и наименьшая) на выходном звене механизма. У равномерных
механизмов ![]() . Равномерными являются
зубчатые, винтовые, фрикционные и некоторые другие механизмы.
. Равномерными являются
зубчатые, винтовые, фрикционные и некоторые другие механизмы.
5.3. Реверсивность механизма – свойство изменять направление движения на выходном звене при неизменном направлении движения входного звена. Достигается это либо переключением специально вводимых в сложный механизм реверсивных устройств ([3, стр.74]), либо без переключения, так как это свойство органически присуще данному механизму (например, кривошипному или кулачковому). В переключаемых реверсивных механизмах различают два состояния и соответствующие им два передаточных отношения или хода iP1, iP2 или SP1, SP2, которые обычно одинаковы и постоянны по величине, но отличаются друг от друга знаком. В большинстве шарнирно-рычажных и кулачковых реверсивных механизмах передаточное отношение обычно переменное по знаку и величине.
5.4. Обратимость механизма. Это свойство механизма позволяет передавать движение в обоих направлениях (от звена 1 к звену n и, при необходимости, от звена n к звену 1). Такая особенность механизмов объясняется, в основном, трением в кинематических парах. В необратимых механизмах в результате самоторможения в одной или в нескольких парах движение возможно только в одном направлении. Самотормозящими и, следовательно, необратимыми могут быть винтовые, кулачковые, некоторые зубчатые (например, червячные) и другие передачи скольжения. Напротив, передачи качения являются, как правило несамотормозящими (обратимыми), так как в зацепление между витками (зубцами) звеньев вводят тела качения (шарики или ролики) и коэффициент трения очень мал. Например, в передаче «винт-гайка качения» небольшой нажим (от руки) на гайку вдоль ее оси приводит винт во вращение. Для обратимых механизмов имеет место равенство i1n=1/in1 , то есть передаточное отношение (и ход) в механизме от звена 1 к звену n обратно передаточному отношению in1 (ходу) от звена n к звену 1. Если хотя бы одна кинематическая пара в механизме самотормозящая, то механизм в целом необратимый.
5.5. Регулируемость механизма. Данное свойство определяется возможностью существенного изменения (или небольшой корректировки) какого-либо параметра движения в механизме. Изменяемыми параметрами движения могут быть: длина хода (угловой или линейный путь), скорость (угловая или линейная), направление движения и исходное положение одного из звеньев механизма. Регулировки в механизмах достигаются переключением коробок скоростей и подач, изменением относительного положения или длины одного из звеньев или заменой звеньев (сменных кулачков или шестерен и т.д.), а также введением в механизм специальных корректирующих устройств (см. [3, стр.66,67]).
В общем случае регулируемость механизма по параметру xj на выходном звене характеризуется диапазоном DX регулирования, DX=xmax/ xmin, где xmax , xmin – максимальное и минимальное значения регулируемого параметра. В качестве параметра xj обычно выбирают линейную или угловую скорость, угловую частоту (в оборотах в минуту или в двойных ходах в мин), путь (угловой или линейный) и другие характеристики.
6. ПРИМЕРЫ АНАЛИЗА МЕХАНИЗМОВ
6.1. Кулачково-рычажный механизм привода подачи поперечного суппорта токарного станка-автомата.
1. Механизм преобразует вращение В1 сменного кулачка 1 (рис.3) в поступательное движение П7 суппорта 7. Промежуточные звенья:
2-ролик, 3 и 4– коромысла с зубчатыми секторами, 5- шатун,
6-коромысло с регулируемой длиной lx рычага, 7- ползун (суппорт), 0- стойка.
2. Число подвижных звеньев n=7; кинематических пар p=11, три из которых двухподвижные (v12, v34, v67). Суммарная подвижность –
vΣ = 8 × 1 + 3 × 2 = 14.
3. Простых механизмов в сложном N = 11 – 7 = 4 (кулачково-рычажный с звеньями 0, 1, 2, 3; зубчато-рычажный с звеньями 0, 3, 4; шарнирный 4-звенник с звеньями 0, 4, 5, 6; рычажно-ползунный с звеньями 0, 6, 7). Размерность всех простых механизмов (все они плоские): R1=R2= R3= R4= 3
4. Общая подвижность механизма по формуле (2) W=14-4×3-1=1. Здесь v0=1 – местная подвижность ролика 2 в паре v23 с коромыслом 3.
5. Механизм неравномерный, так как содержит шарнирно-рычажные передачи.
6. Механизм реверсивный, так как реверсивна кулачковая передача.
7. Механизм необратимый, так как необратима кулачково-рычажная передача.
8. Механизм регулируемый, так как изменением длины lx рычага в коромысле 6 корректируется длина хода Нх суппорта 7, а заменой кулачка 1 изменяется длина хода и скорость подачи суппорта.
6.2. Промышленный робот (рис. 4)
1. В основании 0 размещен приводной двигательМ1, в подвижной стойке 4 установлены двигатели М2, М3 , а на конце руки 6 закреплен пневмодвигатель ПД, ротор 7 которого непосредственно связан со схватом робота. Остальные звенья: 1-шестерня, 2-поворотная платформа, жестко связанная с шестерней, 3 и 5 –ходовые винты.
2. Число подвижных звеньев n=7, кинематических пар Р=10 (одна из них двухподвижная v12), суммарная их подвижность vS=9×1+1×2=11.
3. Степень сложности N = 10 – 7 = 3. Промышленный робот содержит 3 простых передаточных механизма: зубчатый с подвижными звеньями 1-2 (R1=3) и два винтовых, с подвижными звеньями 3-4 и 5-6 (R2=R3=2).
4. Общая подвижность механизма W = 11 – (3 + 2 × 2) = 4, то есть робот 4-подвижный: три подвижности (В2, П4, П6) реализуются от двигателей М1, М2, М3, вращающих входные звенья 1,3,5, а одна подвижность (В7) осуществляется непосредственно (без передаточного механизма) от неполноповоротного пневмодвигателя ПД.
5. Механизм равномерный, нереверсивный, необратимый (содержит винтовые пары скольжения) и регулируемый (направление движения изменяется двигателями, а исходное положение и длина перемещений - путевыми упорами, переключающими двигатели).
Рис. 3 Семизвенный плоский механизм привода подачи суппорта
Рис. 4. Четырехподвижный промышленный робот с
цилиндрической координатной системой
6.3. Суммирующий механизм (рис. 5)
1. В этом механизме ведущими являются валы 1 и 3, ведомыми– вал 7. Цепь передач от вала 1 к валу 7 состоит из червячной передачи z1/z2 и планетарной передачи, в которой вал 2 жестко связан с осями сателлитов 5 и 6, образуя так называемое водило. Последнее передает вращение через шестерни 5 и 6 на вал 7. Вторая цепь (от вала 3) состоит из передач z3/z4, z8/z5, z5/z7 и дублирующих передач z8/z6, z6/z7.
2. Число подвижных звеньев n=7, кинематических пар Р=14 (из них шесть пар –двухподвижные, зубчатые); одна пара (2;4) – пассивная поэтому общая подвижность vå=(14–1)+6=19
3. Сложность механизма N=13-7=6 (две червячных и четыре конических передачи с размерностями Rj=3)
4. Общая подвижность W=19+1–6×3=2. Здесь ск=1 – один замкнутый контур конических передач.
5. Механизм равномерный, нереверсивный, необратимый и нерегулируемый.
Рис. 5. Конический дифференциал: М1, М2 – электродвигатели соответственно
для ускоренного и рабочего хода, 1– вал с червяком z1, 2- вал с закрепленным
на нем водилом В и шестерней z2, 3- вал с червяком z3, 4- ступица с закрепленными
на ней шестернями z4 и z8, 5 и 6 – сателлиты, свободно насаженные на водило В,
7- выходной вал с шестерней z7; пара (2;4) – избыточная, v24=1.
7. ИНДИВИДУАЛЬНЫЕ ЗАДАНИЯ ПО АНАЛИЗУ МЕХАНИЗМОВ
7.1. В приложении (стр. 20, 21) предусмотрены задания для 20 вариантов (см. табл. 4). В задании № 1 по схеме механизма необходимо дать его анализ по методике п.7.2. (см. примеры в п.6). В задании 2 предварительно нужно по макету механизма составить его кинематическую схему, учитывая правила изображения звеньев и кинематических пар (табл.1 и 2).
7.2. При анализе свойств механизмов необходимо:
1) Разобраться в принципе действия и составных частях механизма.
2) Изобразить кинематическую схему механизма, указав в ней все звенья, кинематические пары и их подвижности vjk. При выполнении задания №3 рекомендуется кроме табл. 1 и 2 использовать условные обозначения механизмов в [3, стр.62-65].
3) Дать краткое описание принципа работы механизма с наименованием всех звеньев.
4) Проанализировать структуру механизма в следующем порядке
- указать общее число n подвижных звеньев,
- указать общее число р кинематических пар и определить их суммарную подвижность vå,
- по формуле (1) определить степень сложности механизма N и перечислить типы простых механизмов, входящих в состав сложного с указанием их звеньев и размерностей.
- по формуле (4) определить подвижность механизма W и указать его входные и выходные звенья.
5) Дать оценку равномерности, реверсивности, обратимости и регулируемости механизмов.
При оценке равномерности движения на макете
(задание №2) нужно последовательно, задавая одинаковые перемещения ![]() на входном звене, замерить
соответствующие перемещения
на входном звене, замерить
соответствующие перемещения ![]() на
выходном звене; если
на
выходном звене; если ![]() примерно
одинаковые, то
примерно
одинаковые, то ![]() , механизм
равномерный, в противном случае неравномерной.
, механизм
равномерный, в противном случае неравномерной.
При оценке регулируемости нужно выявить по каким измененным параметрам движения возможна настройка заданного механизма и с помощью каких приемов.
Таблица 4
| Индивидуальное задания | ||||||||||||||||||||
|
№ задания |
Варианты | |||||||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | |
|
1 (табл.5) |
Рис.1 | Рис.2 | Рис.3 | Рис.4 | Рис.5 | Рис.6 | Рис.7 | Рис.8 | Рис.9 | Рис.10 | Рис.11 | Рис.12 | Рис.13 | Рис.14 | Рис.15 | Рис.16 | Рис.17 | Рис.18 | Рис.19 | Рис.20 |
|
2 (макеты) |
№1 | №2 | №3 | №4 | №5 | №6 | №7 | №8 | №9 | №10 | №11 | №12 | №13 | №14 | №15 | №16 | №17 | №18 | №19 | №20 |
8.КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Понятие о передаточном и технологическом механизмах и их составе.
2. Понятие о кинематической паре. Типы пар и их свойства.
3. Что такое подвижность механизма? Примеры.
4. Размерность механизма. Классификация механизмов по числу измерений. Примеры.
5. Какие избыточные («пассивные») элементы вводятся в передаточные механизмы и с какой целью. Примеры.
6. Основные особенности простых и сложных механизмов.
7. Может ли входное звено быть выходным? В каких механизмах?
8. Как оценивается равномерность движения механизма?
9. Какие элементы в механизмах регулируются и с какой целью?
10. Что такое ход и передаточное отношение механизма? В чем отличие ходов и передаточных отношений простого и сложного механизмов.
11. Чему равны передаточное отношение и ход в следующих механизмах: в зубчатой цилиндрической передаче, в червячной передаче, в реечной передаче, в винтовой передаче, в ременной передаче, в цепной передаче?
9. БИБЛИОГРАФИЧЕСКИХ СПИСОК
1. Металлорежущие станки /Под ред. Н.С.Ачеркана.-М.:Машиностроение, 1965.
2. Федотёнок А.А. Кинематическая структура металлорежущих станков.-М.:Машиностроение, 1970.
3. Клюйко Э.В. Кинематика металлорежущих станков.-Калинин:КПИ, 1974.
4. Клюйко Э.В., Матвеев А.И. Металлорежущие станки общего назначения.-Тверь:ТГТУ, 1999.
5. Клюйко Э.В. Изучение передаточных механизмов металлорежущих станков. Методические указания к лабораторной работе.-Тверь: КПИ, 1991.
